从题目出发复习数据科学数学基础
导论
求卷积
求TF-IDF
考虑结构风险的损失函数
线性代数
求矩阵的逆
求解线性方程组
求 线性组合
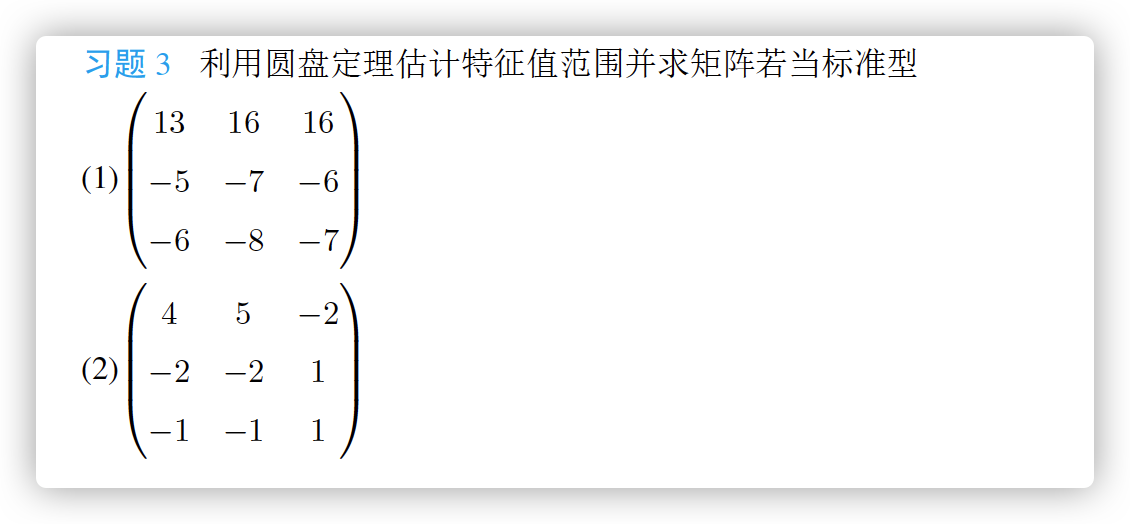
求特征值与特征向量
求新基坐标
求二次型的标准型
判断正定矩阵
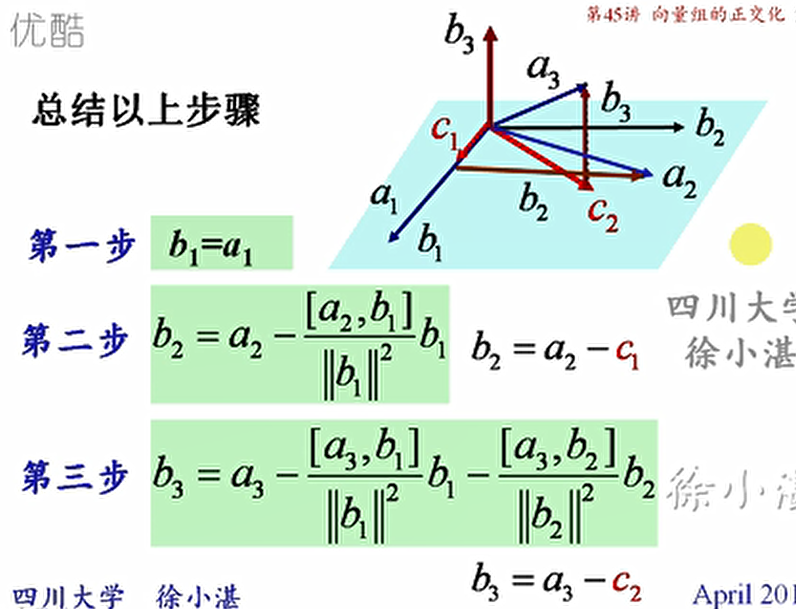
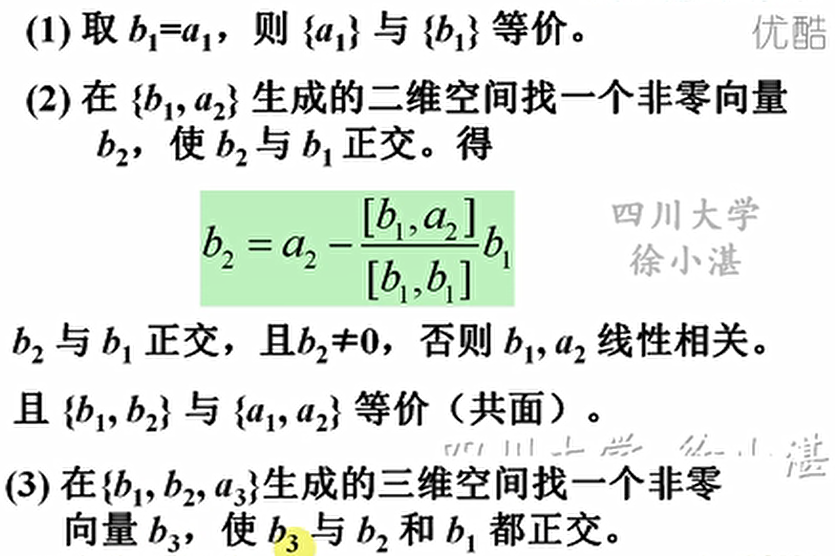
标准正交化
[a,b]即a与b的内积之意
度量与投影
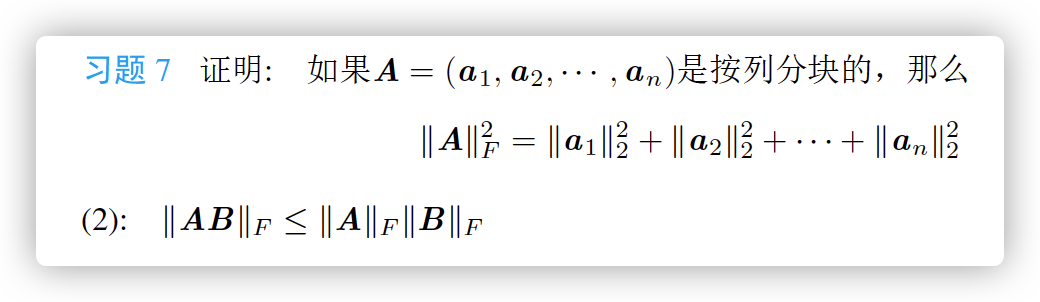
范数
范数的定义
设 $\mathbb V$ 是数域上 $\mathbb K$ 的 n 维线性空间,那么函数 $||\cdot||: \mathbb V\rightarrow \mathbb R,x\rightarrow ||x||$ 就是将 $x$ 映射为它的长度 $||x||\in \mathbb R$ ,并且满足非负性、齐次性和三角不等式。
我们称$||x||$ 是向量 x 的向量函数,称定义了范数的线性空间 $\mathbb V$ 为赋范线性空间。
几种常用的向量范数
$l_p$ 范数
对于任意 $x = (x1,x_2,\cdots,x_n)\in \mathbb R^n$ ,由 $||x||_p = (\sum{i=1}^n |x_i|^p)\frac{1}{p}, 1\leq p< \infty$
定义的 $||\cdot||_p$ 是 $\mathbb R^n$ 上的向量范数,称为 $p$ 范数 或者 $l_p$范数
- 当 p = 1时,得到 1范数 或者 $l1$ 范数 ,也称 Manhattan 范数 : $||x||_1 =\sum{i = 1}^n |x_i|$
- 当 p = 2时,得到 2范数 或者 $l2$ 范数, 也称为欧几里得范数 : $||x||_2 = \sqrt{\sum{i=1}^n x_i^2}$
$l_\infty $ 范数
当p取无线大的时候,是否存在这种范数呢?
对 $\forall x=(x1,x_2,\cdots,x_n)\in \mathbb R^2$ , 由 $||x||\infty = \lim \limits_{p\rightarrow\infty} ||x||_p$
也就是$||x||\infty = \max{i=1,\cdots,n}|x_i|$
定义 $||\cdot||\infty$ 是 $\mathbb R^n$ 上的向量范数,称为 $\infty$ 范数 或者 $l\infty$ 范数。
非向量范数
当 $0<p<1$ 时, 由 $||x||p = (\sum{i=1}^n|x_i|^p)$ 定义的 $||\cdot||_P $ 不是 $\mathbb R$ 上的向量范数
举一个特例就能证明。
基数函数 $l_0$ 范数
向量 $x$ 的基数函数定义为 $x$ 即 $card(x) = \sum_{i=1}^m \mathcal I(x_i \neq 0)$
其中, $\mathcal I(x_i\neq 0)= \begin{cases}{1},x_i\neq 0\ 0, {x_i = 0}\end{cases}$
基数函数也被称为$l_0$ 范数,但是它并不满足范数定义的条件
几种常见的矩阵范数
矩阵1范数(列模)
矩阵的每一列上的元素绝对值先求和,再从中取个最大的,(列和最大)
矩阵2范数(谱模)
$||A||2 = \max\limits{X\neq0} \frac{||AX||2}{||X||_2}=\sqrt{\lambda{max}(A^TA)} =\sqrt{\max\limits_{1\leq i\leq n}|\lambda_i|}$ ,其中 $\lambda_i$为 $A^TA$ 的特征值。
也就是说求矩阵 $A^TA$ 的最大特征值的开方
矩阵的无穷范数(行模)
矩阵的每一行上的元素绝对值先求和,再从中取个最大的,(行和最大)
求范数、无穷范数
例题
求向量 $x=(-1,2,4)^T$ 的 0,1,2 和 $\infty$ 范数
$||x||_0 = 3$ 非0元素的个数
$||x||_1= |-1|+2+4 = 7$
$||x||_2 = \sqrt{|-1|^2+2^2+4^2} = \sqrt{21}$
$||x||_\infty = max {|-1|,2,4}$
证明某函数为向量范数
思路:
满足三个性质,即非负性、齐次性以及三角不等式
注意了,当且仅当$x_i$ 全是0的时候,范数才等于零;如果$x_i$ 不为零式子却是0,那么这就不满足非负性
例题
1
对任意的 $x = (x_1,x_2,x_3)^T\in \mathbb C^3$ ,试问如下实值函数是否构成向量范数?
- $|x_1|+|2x_2+x_3|$
- $|x_1|+|2x_2|-5|x_3| $
要让函数构成向量范数,必须满足三个性质,即非负性、齐次性以及三角不等式
对于1
- 非负性,易证
- 齐次性, 令 $c\in \mathbb C, |cx_1|+|2cx_2+cx_3|=|c|(|x_1|+|2x_2+x_3|)$
- 三角不等式:$x = (x_1,x_2,x_3)^T,y = (y_1,y_2,y_2)^T \in \mathbb C^3$ , 则 $|x_1+y_1|+|2(x_2+y_2)+(x_3+y_3)|\leq |x_1|+|2x_2+x_3|+|y_1| + |2y_2+y_3|$ 即 x 的范式加上 y 的范式
对于2
取 $x=(0,0,1)$ 则 $|0|+|2\times 0|-5|1| = -5 < 0 $ 不满足非负性,所以2不是范范数
证明某函数是内积
标准内积的定义:
n维实向量空间 $\mathbb R^n$ 的标准内积(点积)是两个向量的对应元素乘积之和。
即: $
现在我们引申出内积的定义。设$\mathbb V$是数域上$\mathbb K$ 的 n 维线性空间,函数$<\cdot,\cdot>:\mathbb V\times \mathbb V\rightarrow \mathbb R $它把向量$x,y\in \mathbb V $ 映射为一实数 $
- 非负性 :$
- 对称性:$
- 齐次性:$<\lambda x,y> = \lambda
- 线性性:$
称$
四个基本子空间的计算
列空间 $Col(A)$
行空间是其列向量 ${a_1,a_2\cdots,a_n}$ 的所有线性组合的集合,它是 $\mathbb R^m$ 的一个子空间,用符号 $Col(A)$ 表示。有:
$Col(A)={y\in \mathbb R^m|y=\sum_{j=1}^n\alpha_ja_j,\alpha_j\in\mathbb R }=span{\alpha_1,\alpha_2,\cdots,\alpha_n }$
例题:
现有矩阵:$\begin{pmatrix} 1 & -1 & 0 \ 2 & 4 & 1 \ 4 & 2 & 1 \end{pmatrix}$ 求其列空间
矩阵列变换 : $\begin{pmatrix} 1 & -1 & 0 \ 2 & 4 & 1 \ 4 & 2 & 1 \end{pmatrix}=\begin{pmatrix} 1 & 0 & 0 \ 2 & 1 & 0 \ 4 & 1 & 0 \end{pmatrix}$
列公式 : $Col(A)=\alpha_1(1,2,4)^T+\alpha_2(0,1,1)^T+\alpha_3(0,0,0)^T$
- 写成span形式: $=span{(1,2,4)^T,(0,1,1)^T}$
行空间$ Row(A)=Col(A^T)$
- 矩阵行变换: $\begin{pmatrix} 1 & -1 & 0 \ 2 & 4 & 1 \ 4 & 2 & 1 \end{pmatrix}=\begin{pmatrix} 1 & -1 & 0 \ 0 & 6 & 1 \ 0 & 0 & 0 \end{pmatrix}$
- 列公式: $Col(A^T)=\alpha_1(1,-1,0)^T+\alpha_2(0,6,1)^T+\alpha_3(0,0,0)^T$
- 写成span形式: $span{(1,-1,0)^T,(0,6,1)^T}$
零空间 $Null(A)$
零空间是所有满足齐次线性方程组$Ax = 0$ 的解向量集合,它是$\mathbb R^n$ 的一个子空间,用符号
$Null (A) $表示,即有 $Null(A)={x\in \mathbb R^n|Ax=0}$
- 求解线性方程组 $Ax=0$ ,$\begin{pmatrix} 1 & -1 & 0 \ 2 & 4 & 1 \ 4 & 2 & 1 \end{pmatrix}x=\begin{pmatrix} 1 & -1 & 0 \ 0 & 6 & 1 \ 0 & 0 & 0 \end{pmatrix}x =0$
- 解得$(x_1,x_2,x_3)^T =k (1,1,-6)^T$
- 写成span形式: $=span{(1,1,-6)^T}$
左零空间 $Null(A^T)$
左零空间是所有满足齐次线性方程组$A^Ty = 0$ 的解向量集合,它是$\mathbb R^m$ 的一个子空间,用符号
$Null (A^T) $表示,即有 $Null(A^T)={y\in \mathbb R^n|A^Ty=0}$
- 求解线性方程组 $A^Ty =\begin{pmatrix} 1 & 2 & 4 \ -1 & 4 & 2 \ 0 & 1 & 1 \end{pmatrix}y=0$
- 解得$(x_1,x_2,x_3)^T = k(2,1,-1)^T$
- 写成span形式 $span{(2,1,-1)^T}$
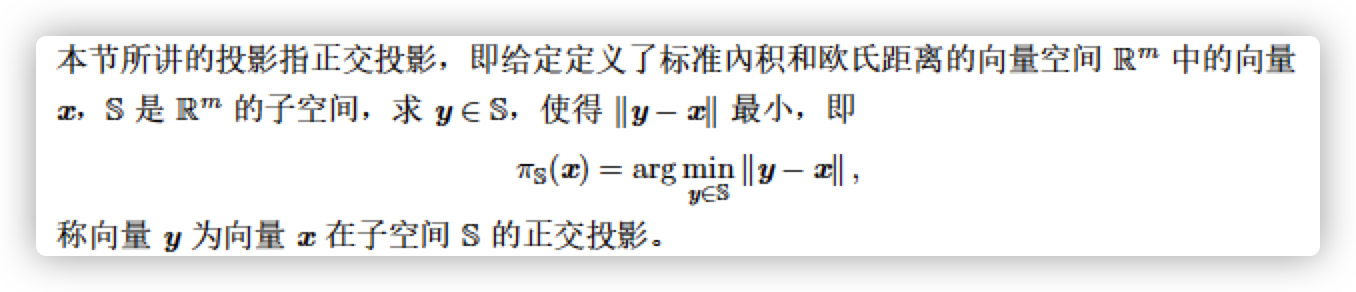
求正交投影
设 $\mathbb V$ 是一向量空间,$\mathbb W\subseteq \mathbb V$ 是$\mathbb V$ 的一个子空间。如果线性映射$\pi:\mathbb V\rightarrow \mathbb W$ 满足 $\pi^2 =\pi\circ \pi = \pi$ 则称 $\pi$为投影。
设$\pi$对应的矩阵$P{\pi}$ ,显然$P{\pi}$ 满足 $P^2{\pi}=P{\pi}$ ,称$P_\pi$为投影矩阵。
到一维子空间
设基底矩阵$B = [b]$,也就是这组基中仅有一个向量。
设$\mathbb R^n$ 的子空间$\mathbb W = Col(B)$, 我们想寻找一个点$\pi_\mathbb W(x)\in\mathbb W $最接近x。
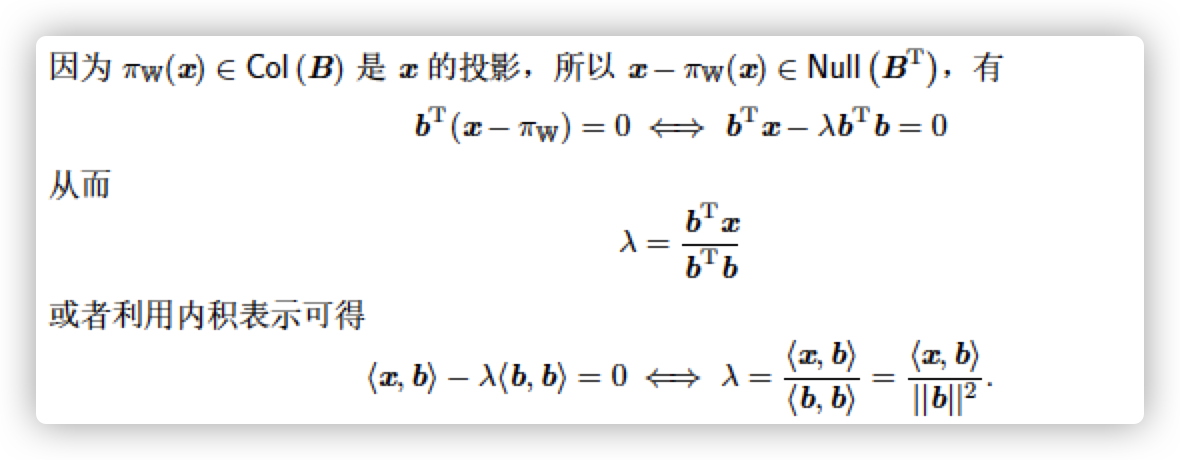
因为$\pi_\mathbb W(x)\in \mathbb W$,又 $W = Col (B) = span{b}$
所以$\pi_\mathbb W(x)=\lambda b,\lambda\in \mathbb R$
接下来,我们将逐步确定$\lambda,\pi\mathbb W(x)$和投影矩阵$P\pi$
- 确定 $\lambda$
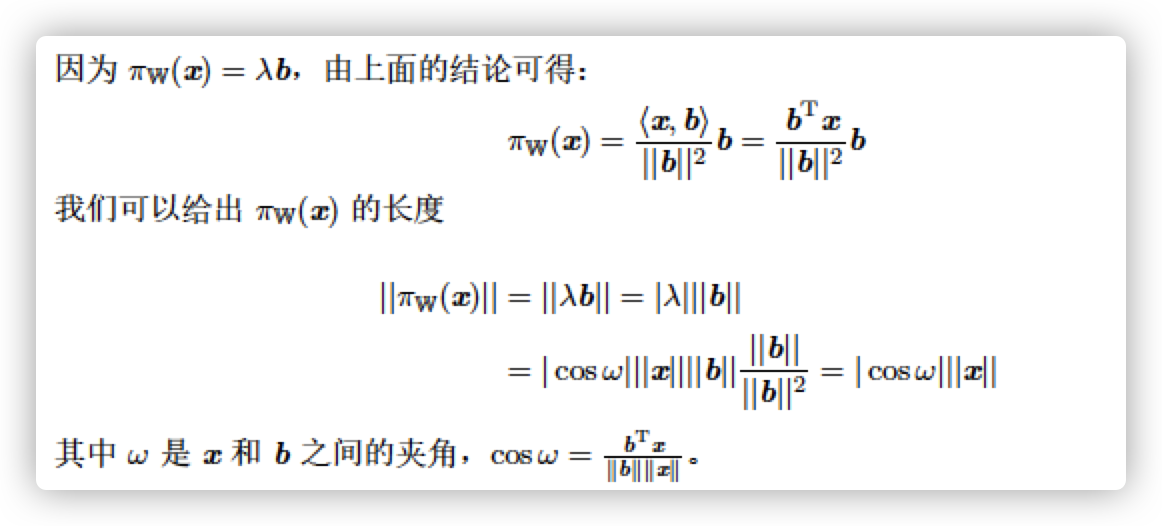
- 确定 $\pi_\mathbb W(x)$
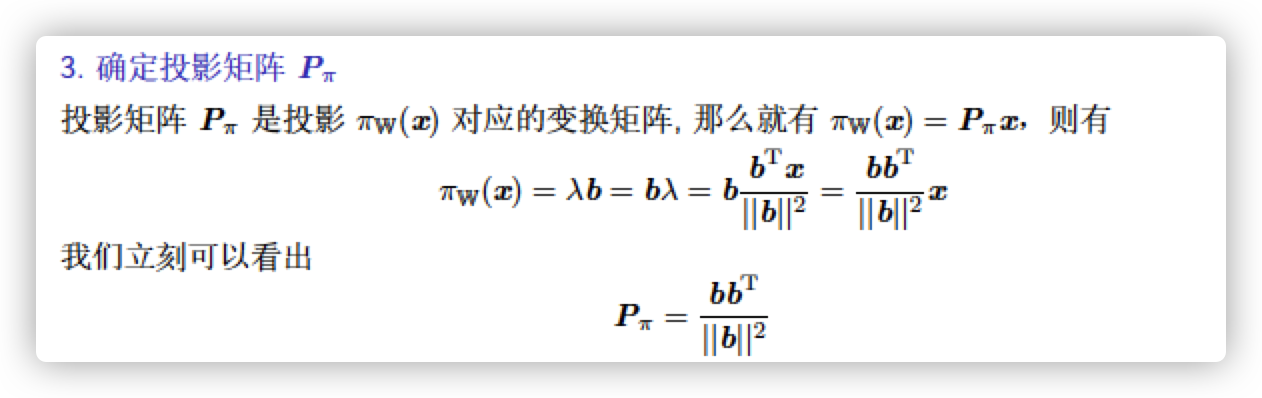
- 确定 $P_\pi$
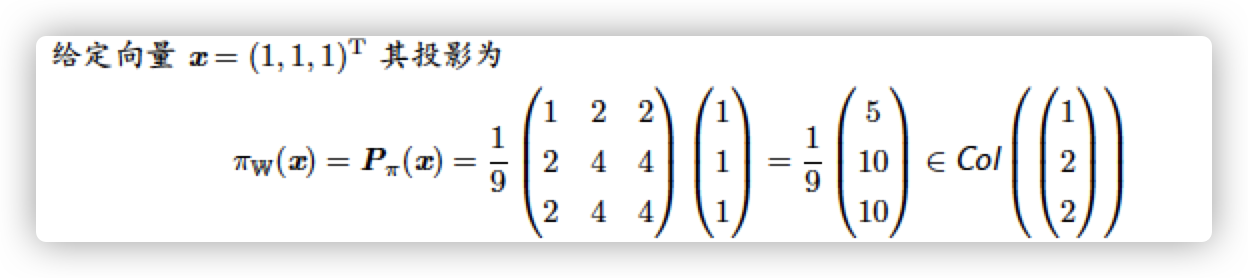
- 求得投影:
到一般子空间
设$B = (b1,\cdots, b_n)$ 是子空间$\mathbb U$ 的一个有序基底。任何$\mathbb U$ 上的投影$\pi\mathbb U(x)$ 必须是U 中的一
个元素。故有$\pi\mathbb U(x) = \sum{i=1}^n\lambda_ib_i$
- 确定 $\lambda_1,\cdots,\lambda_n$

- 确定 $\pi_\mathbb W(x)$
- 投影矩阵$P_\pi$
$P_\pi = B(B^TB)^{-1}B^T$
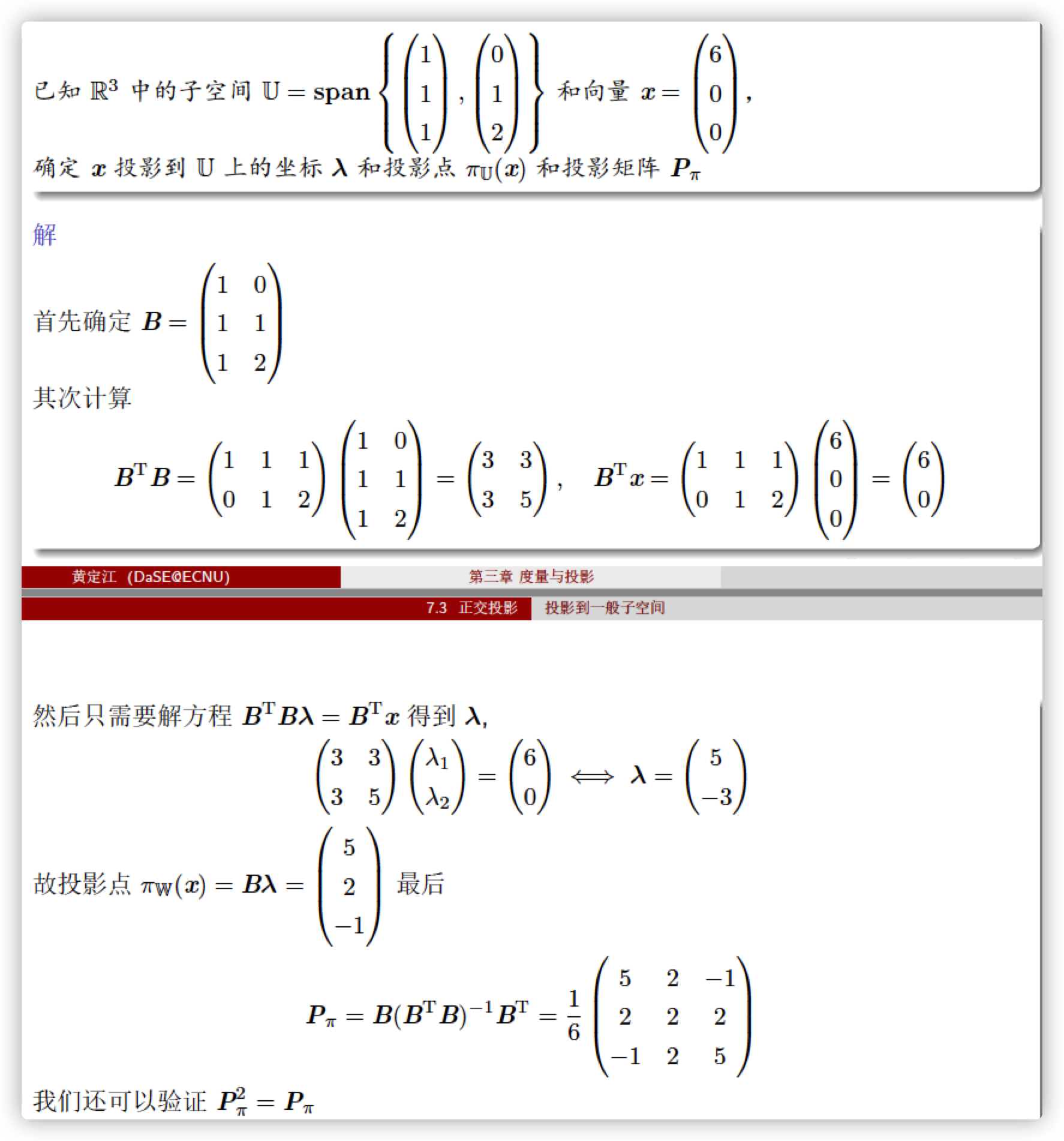
例题:
到仿射空间
给定一个仿射空间 $\mathbb L = x0+\mathbb U$ 其中,$b_1,b_2$是$\mathbb U$ 的基向量,为了确定 x在$\mathbb L$ 上的正交投影 $\pi\mathbb L(x)$
我们将问题转化为我们知道如何解决的问题:投影到向量子空间上。为此,我们从x和$\mathbb L$ 中减去支撑点 $x_0$ ,所以 $\mathbb L-x_0=\mathbb U$恰好是向量子空间 $\mathbb U$
现在,我们前面讨论过的在子空间上的投影,获得投影$\pi_\mathbb U(x-x_0)$ 。 最后我们通过添加$x_0$将该投影转换回 $\mathbb L$ ,这样我们就可以得到仿射空间 $\mathbb L$上的正交投影:
$\pi\mathbb L(x) = x_0+\pi\mathbb U(x-x_0)$
例题:
求向量 $(1,1,1)^T$ 投影到仿射空间,$span{(1,-1,1)^T,(1,1,0)^T}+(1,2,1)^T$ 的正交投影
首先我要求 $\pi\mathbb U(x-x_0)=\pi\mathbb U(0,-1,0)$
令 $B=\begin{pmatrix} 1 & 1 \ -1 & 1 \ 1 & 0 \end{pmatrix}$ , $B^TB=\begin{pmatrix} 3&0\0&2\end{pmatrix}$
$B^T(x-x_0)=\begin{pmatrix} 1&-1&1\1&1&0\end{pmatrix}\begin{pmatrix} 0&-1&0\end{pmatrix}^T =(1~~-1)^T$
解方程组 $B^TB\lambda=B^Tx \Rightarrow \begin{pmatrix} 3&0\0&2\end{pmatrix}\lambda = \begin{pmatrix} 1\-1\end{pmatrix}$ 解得 $\lambda=\begin{pmatrix} \frac{1}{3}\-\frac{1}{2}\end{pmatrix}$
最后我们求 $\pi_\mathbb W(x-x_0)=B\lambda = \begin{pmatrix} -\frac{1}{6}\-\frac{5}{6}\\frac{1}{3}\end{pmatrix}$
$\pi\mathbb L(x)=x_0+\pi\mathbb W(x-x_0)=\begin{pmatrix} \frac{5}{6}\\frac{7}{6}\\frac{4}{3}\end{pmatrix}$
线代基础


矩阵分解
求张成的子空间
设 $a1,a_2,\cdots,a_r$ 是$\mathbb V$ 的一组向量,则这组向量所有可能的线性组合 $\sum{k=1}^r\lambda_ka_k$ 所成的集合是$\mathbb V$ 的一个子空间,称为由 $a_1,a_2,\cdots,a_r$ 张成的子空间,记作 $L(a_1,a_2,\cdots,a_r)$ 或者 $span(a_1,a_2,\cdots,a_r)$ 。 $(a_1,a_2,\cdots,a_r)$ 叫做$\mathbb V$ 的生成集。
换句话说,张成子空间就是由$x_1,x_2,…,x_r(r>0)$中极大线性无关组作为基向量所构成的空间。因为其余任何向量都可以被这个无关组所表示,满足空间中向量的无穷性。
比如求 向量$(1,2,0)^T,(0,1,2)^T$ 张成的子空间
首先确定两者线性无关,因此二者张成的子空间为 $((1,2,0)^T,(0,1,2)^T)$
求正交补空间
设 $\mathbb S$ 和 $\mathbb T$ 是 $\mathbb R^n$ 的两个子空间。如果对于 $\forall v\in \mathbb S,\forall w\in \mathbb T$ 均有 $v^Tw = 0$ 我们说 $\mathbb S$垂直于 $\mathbb T$ 或者说 子空间$\mathbb S$ 和子空间 $\mathbb T$ 是正交的。
相对于正交,正交补是两个子空间更强的一种关系
定义正交补: 设 $\mathbb V \in \mathbb R^n$ 是一个子空间,$\mathbb V$ 在$\mathbb R^n$ 中的正交补定义为集合:${w\in \mathbb R^n|v^Tw=0,\forall v\in\mathbb V}$
记作$\mathbb V^{\bot}$
已经知道了一个子空间,怎么求它的正交补呢?我们可以利用这个性质:
$Col(A^T)^\bot = Null(A) , Col(A)^\bot = Null(A^T)$
因此$A= ((1,2,0)^T,(0,1,2)^T)$ 的正交补就可以写作$ Null(A^T) = span{(4,-2,1)^T} $
LU 分解
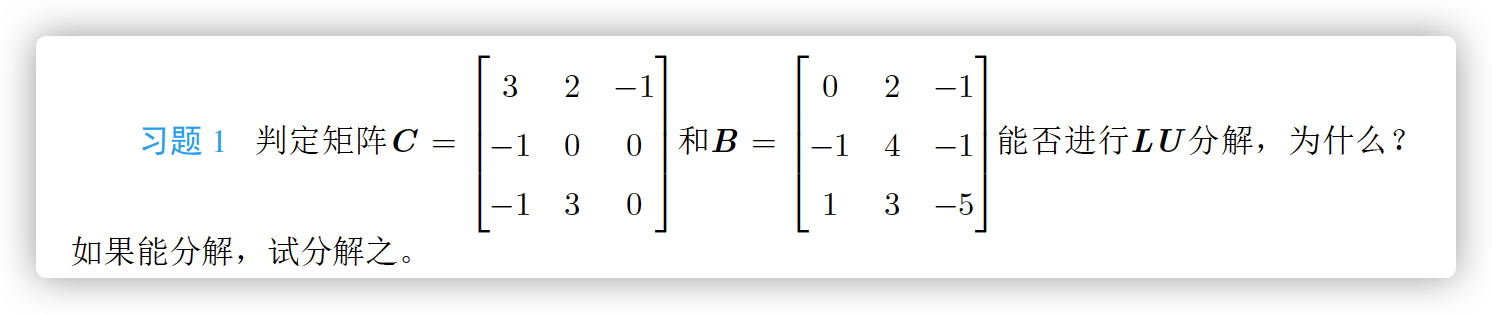
判断是否能进行 LU 分解: 若矩阵的一阶顺序主子式为0,那么就不能分解。
LU 分解指将$n\times n$ 的矩阵A分解成两个三角矩阵的乘积
其中, L 为 $n\times n$ 单位下三角矩阵(对角元素为1),U 是 $n\times n$ 上三角矩阵。
从秩1分解的角度分析 $A=LU$ , 可以将 A 写成若干个 秩1矩阵和的形式:
其中r为矩阵A的秩,若A是满秩,则 $r=n$ 。 $l_i$ 是 $L$ 的第$i$列;$u_i$ 是 $U$ 的第$i$行。 $l_iu_i$ 都是秩为1的矩阵,并且这个矩阵的前 $i-1$行和前$i-1$列的元素都是0
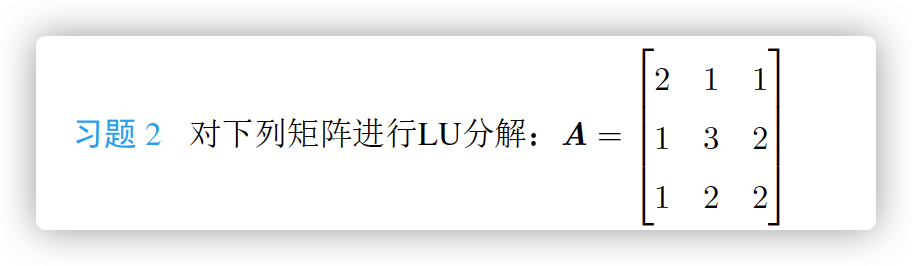
求矩阵A
的LU分解
我们要像剥洋葱一样一层一层地分解矩阵A,同时要记得 L 的对角线都是1
- 第一步
令 $u1$ 是 A 的第1行,$l_1$ 是A的第1列 除以 $u{11}$ ,则:
- 第二步
令 $u2$ 是 $A-l_1 u_1$ 的第2行,$l_2$ 是 $A-l_1u_1$ 的第二列除以$u{22}$
- 第三步
令$u3$ 是$A-l_1u_1-l_2u_2$ 的第3行,$l_3$ 是 $A-l_1u_1-l_2u_2$ 的第3列除以$u{33}$ 即
- 第四步,我们要把$l_1,l_2,l_3$ 相加得到$L$ ,$u_1,u_2,u_3$ 相加得到$U$
Cholesky 分解
QR分解
奇异值分解
谱分解
方程求解问题,最小二乘
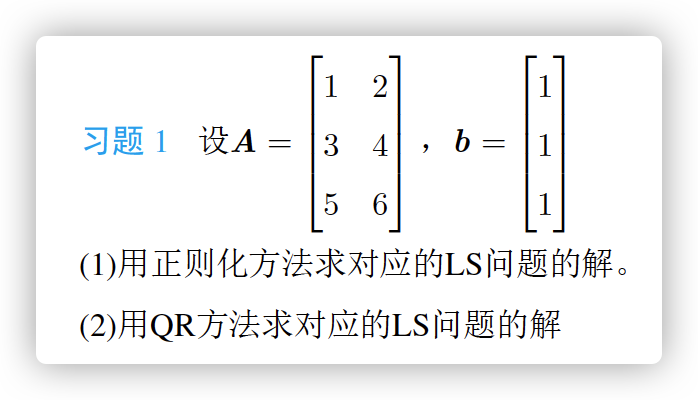
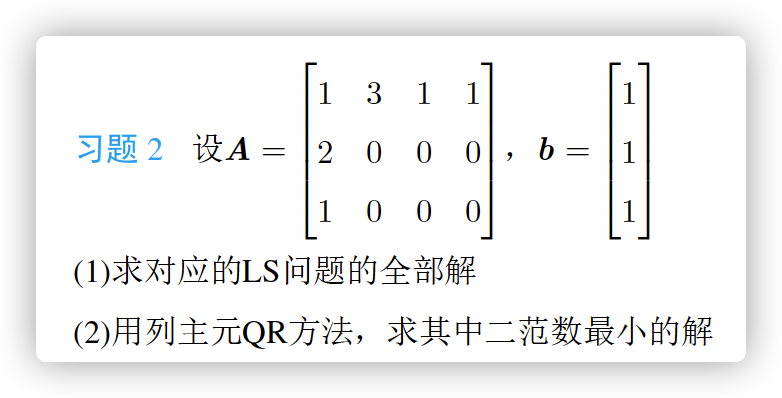
求解 $AA^T x = A^Tb \Rightarrow$ 方程组求解
QR 解法:
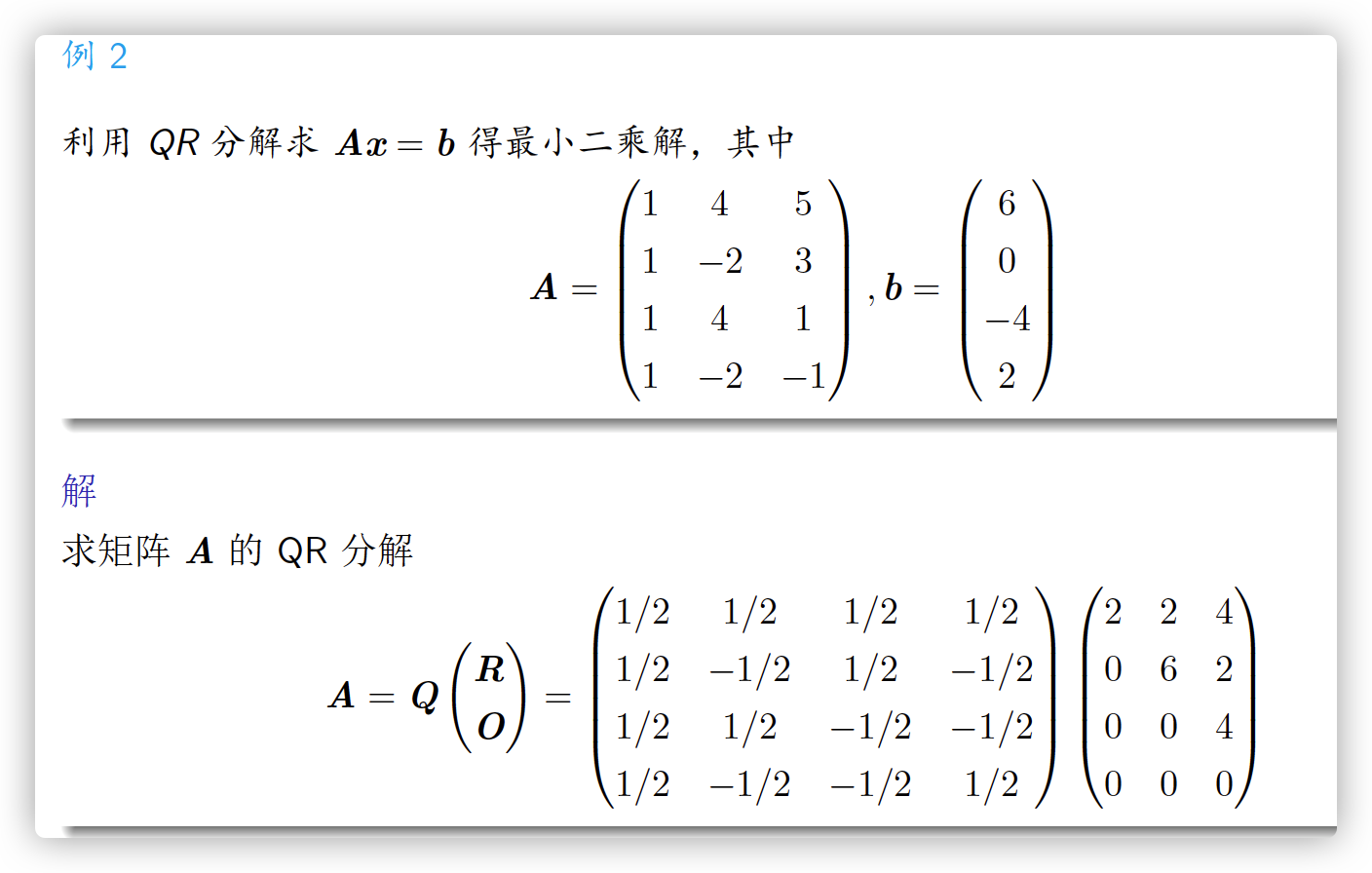
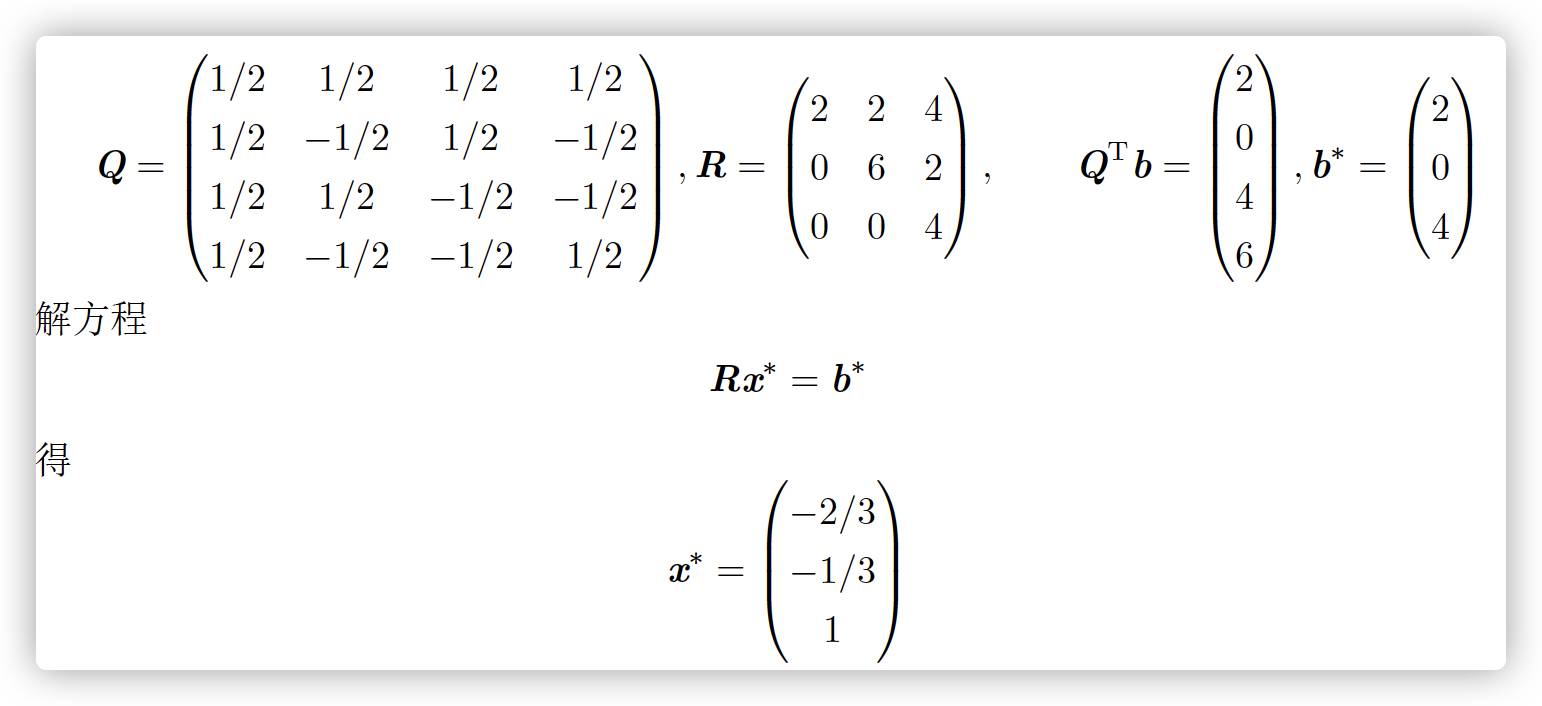
要求QR,为了凑分,我们只能先求正则化情况下的x,得到答案后,计算 R矩阵,令 $Rx =b^$ 然后装模做样的求出 $b^$, 其实只是我们反推得到的。
矩阵微分
求梯度:
首先,这让我们化简一下向量2-范数。$l_2 = \sqrt{\sum |x_i|^2}$ 那么对于这个矩阵,可以用 $\sqrt{(Ax+b-y)^T(Ax+b-y)}$ 来算
所以:
由 $df = dTr(f) = Tr(df)$ 可得:
我们知道这样一个公式: $df = Tr(A^Tdx)\Rightarrow \frac{\partial f}{\partial x}=(A^T)^T=A$
因此,我们如果要求 $\frac{\partial f}{\partial A}$, 也可以用这种方法
因为我们知道$d(cA) = cd(A)$
所以前面这部分可以写成是:
又知道:$\frac{\partial}{\partial x^T}f = (\frac{\partial }{\partial x}f)^T$ ,所以这里 $x^T(Ax+b-y)$ 为f,
最后,我们求得:$df = (x(Ax+b-y)^T)^T=(Ax+b-y)x^T$



这里我们要说一些书本上的结论。
如果矩阵可逆,说明非奇异矩阵,那么:$\frac{\partial |A|}{\partial A}=|A|(A^{-1})^T$

优化基础1
Keyouxing
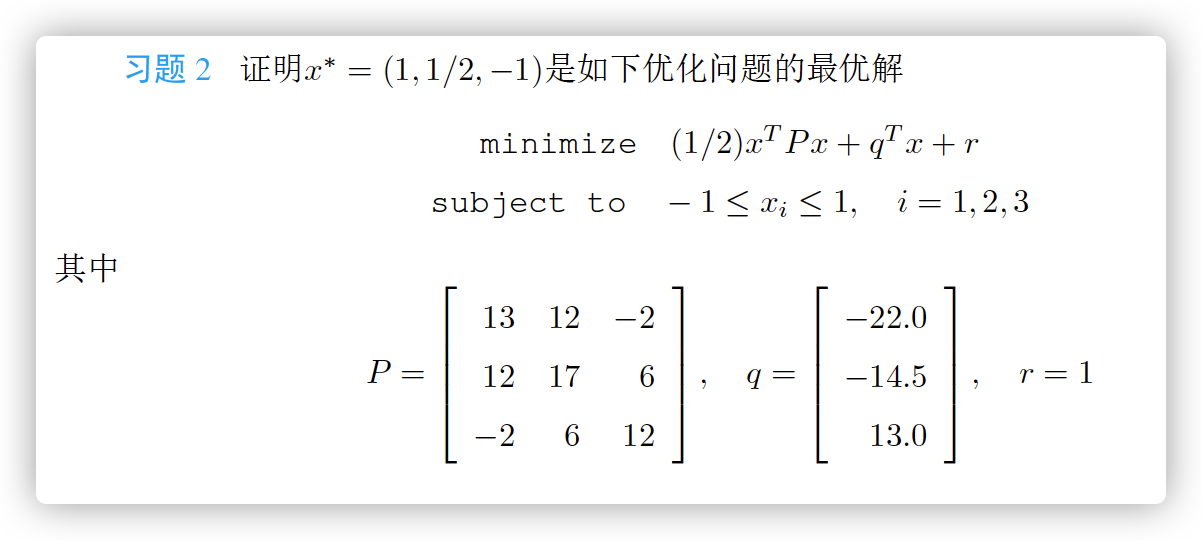
这是对可微函数的优化。首先就是要求出 $x^$ 的梯度$\nabla f_0(x)^T$,同 时要检验 $\nabla f_0(x)^T(y-x)\geq 0$ 成立则说明 x 即最优点。
对于上面这题,首先要求 $\frac{\partial f}{\partial x}$ 然后把 pqx*都带入得到 $\nabla f_0(x)^T$
目标是求 $\max{xy-f(x)}$ 然后 $xy-f(x)$ 的导数,并反解出x=g(y),再将其带入 $xy-f(x)$ 即可。
优化II(对偶)

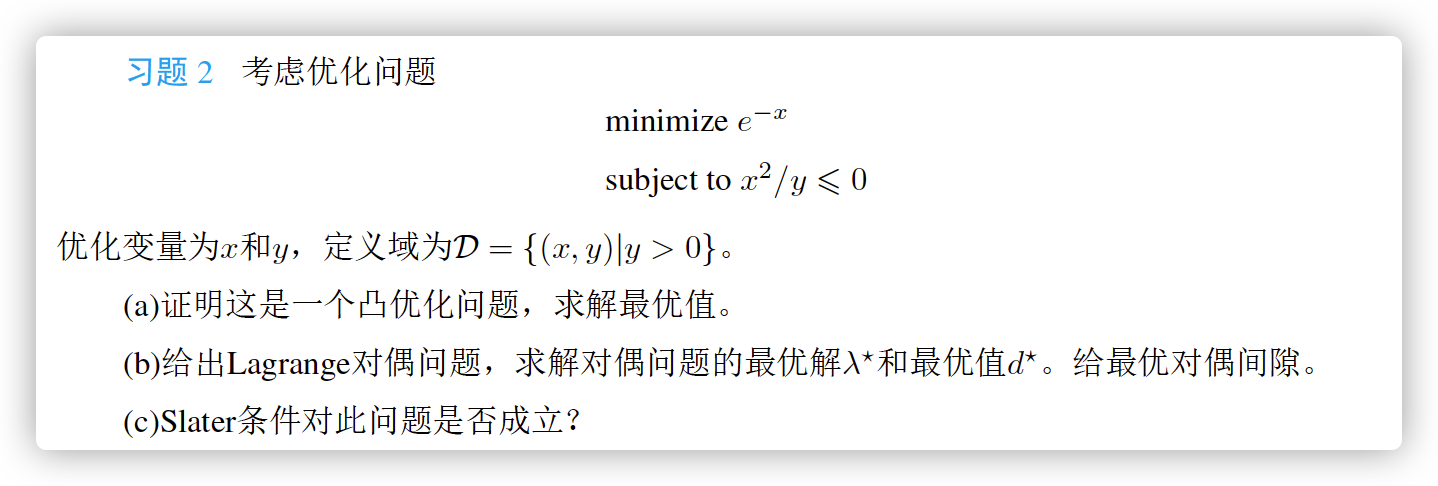
a. 要证明目标函数(minimize), 和 不等式约束函数都是凸函数。
b. 
对偶函数就是要求拉格朗日图形的下界。
c.slater条件,这里 定义域内部的点要满足 $g(x)$ 也就是 $\frac{x^2}y <0 $ 成立