计算机视觉-卷积神经网络
在卷积神经网路理论中,我们简单介绍了一下卷积神经网络的原理,现在我们来系统学习神经网络的相关知识。
正向传播
在 神经网络和反向传播 中,我们学习了全连接层,那么,全连接层有什么缺陷呢?
第一层假设是 $x\in \mathbb R^{100\times100\times 3}$ ,第二层假设有4096个神经元,那么这全连接一下,就需要第一层有$30000 \times 4096\approx 1.2\text{亿}$ 个参数,这是不能承受之重啊——因此我们需要用到新的方法。
其实我们也提出了解决的方法:
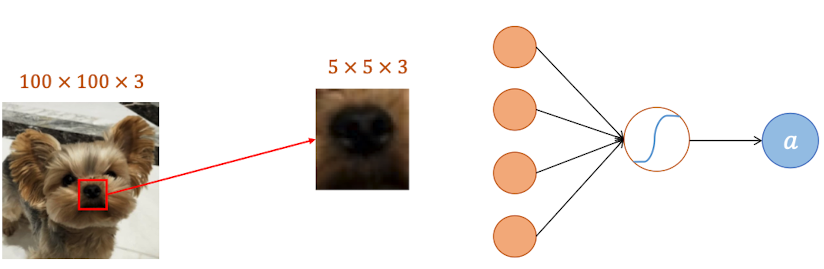
局部pattern:每个神经元捕获局部pattern,以减少权重参数。相当于每个神经元各司其职
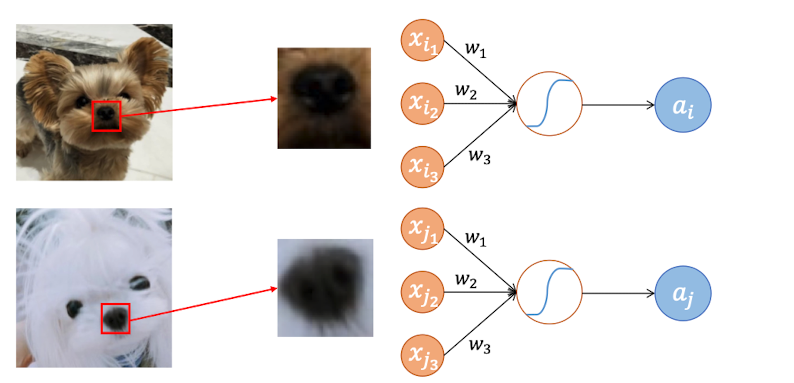
相似pattern:功能相似的神经元可以共享权重参数,比如两个神经元都是处理鼻子特征的,那么可以使用一套参数
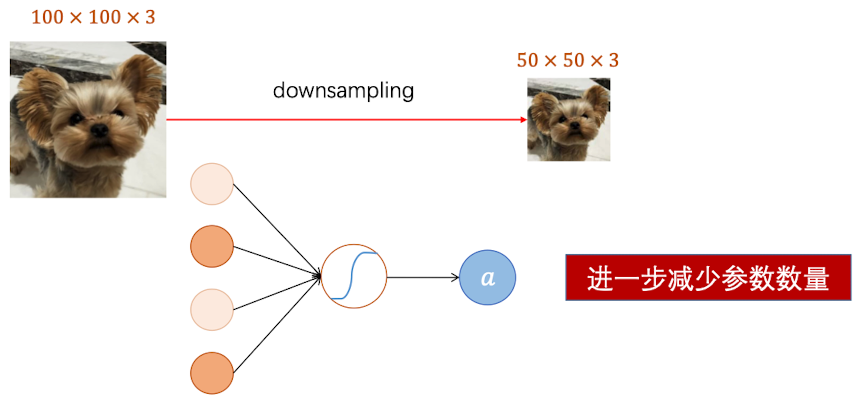
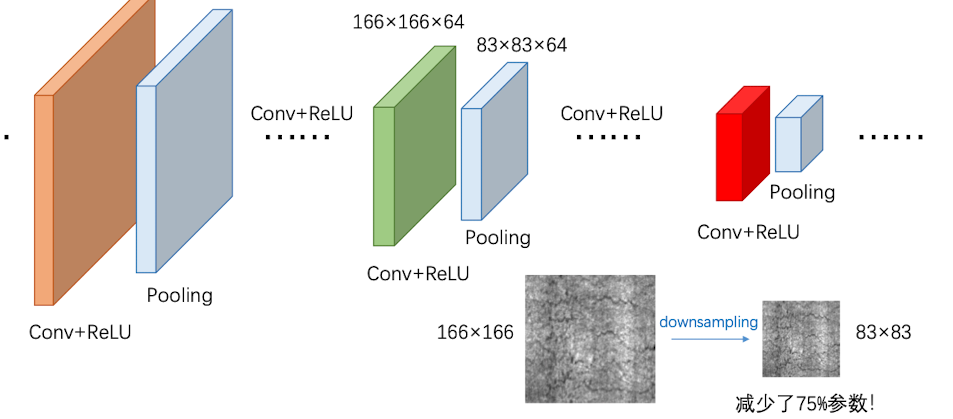
像素采样:可以通过压缩等方式,将像素下采样,以进一步减少参数数量
卷积神经网络
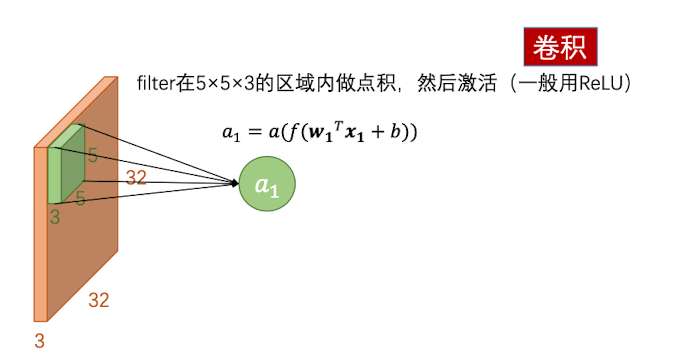
那么,把这三者结合起来,就是卷积神经网络的作用。首先,伸进网络最重要的就是理解卷积核(kernel/filter)的作用,卷积核就是一个权重矩阵(参数矩阵),用来捕捉局部的特征,其深度和图像深度(信道数)是一样的。比如说 ,现在有一个 $32\times32\times3$ 的图像矩阵,卷积核一般很小,比如说$5\times 5$,那么其深度一定是3。
用这个卷积核和图像在$5\times 5\times3$的区域内做点积,这样就会得到一共75个值,然后将其求和,输出得到第一个神经元$a_1$ ,然后用ReLU函数激活——这整个过程就叫做一次卷积。这样一来,就避免了$32\times32\times3$的超大型权重矩阵,只需要一个小型权重矩阵即可。
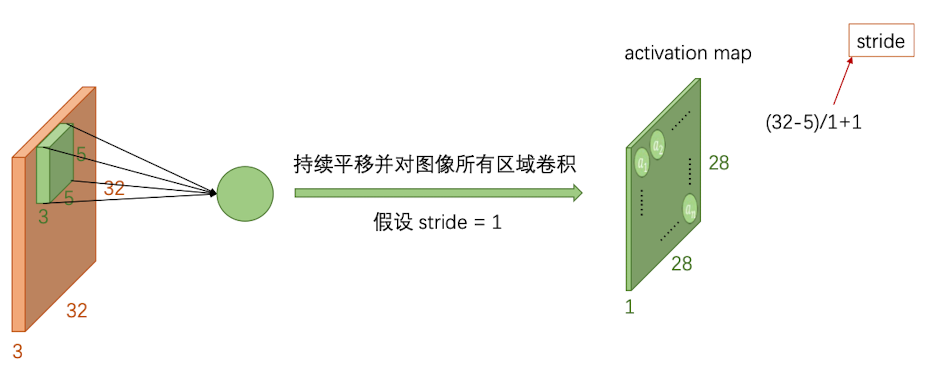
此外,由于一张图片多次出现同一个特征,因此一个卷积核对图片做一次卷积是远远不够的,需要扫描整张图片。那么该隔远扫描一次呢?这个距离就叫做步长(stride),一般这个长度不会超过3。横向扫描一遍,接着跳到下一行再扫描一遍。整张图扫描下来,像素就会缩水一点。
比如,对$32\times32\times3$的图片用$5\times 5\times3$的卷积核卷积一遍,就会得到一张$28\times28\times1$的图片:
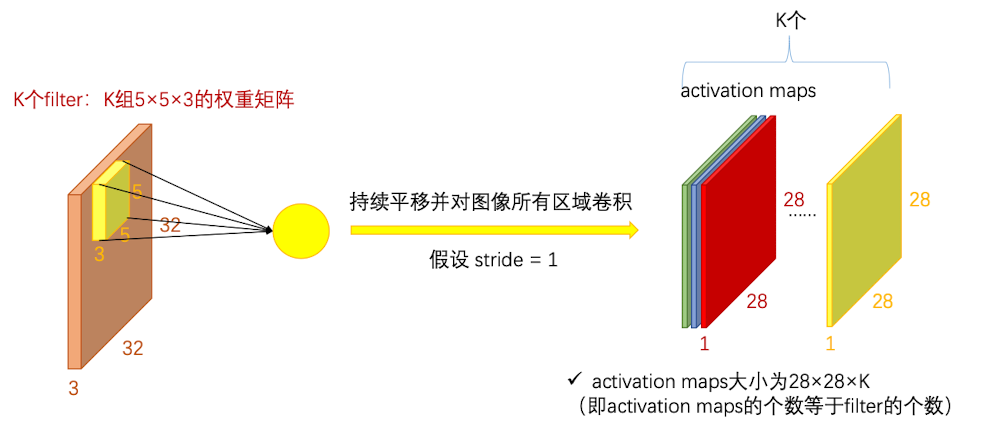
但是,一张图片不仅仅只有这一个特征,因此我们需要多个卷积核共同作用,每一个卷积核捕获不同的特征(在训练神经网络的时候会自动学习到不同特征)最后得到k层activation map
因此我们要记住:卷积核的深度和输入图片的信道数有关,而activation maps的深度适合卷积核的个数有关的
卷积层
上面得到的activation maps其实就是一个卷积层,而对于这个卷积层,又会有其他卷积核对其进行卷积,最后达成对原始图片进行不断地降维的目标。
FC层 vs 卷积层
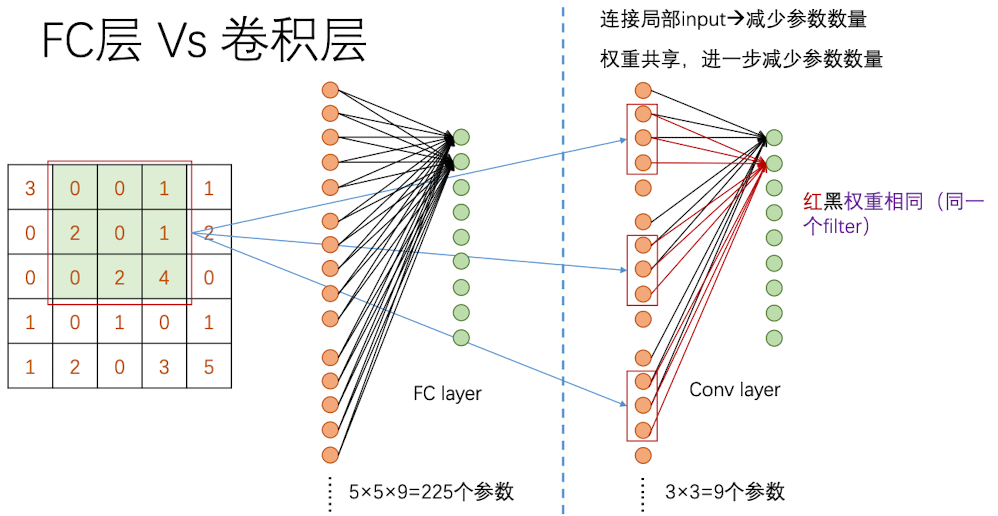
现在我们来看看全连接层(仿射层/FC层)和卷积层的对比。为了方便,我们拿$5\times5\times1$的输入图像作为例子;全连接层拿9个神经元作为例子,卷积核以$3\times3\times1$为例
如果是全连接层,要得到一个神经元的输入值,需要每个位置的像素点和权重做乘积后求和,那么这一层就一共需要$5\times5\times9=225$个参数。但是对于卷积层来说,不是一行一行去做卷积的,而是一个区域一个区域去做卷积。因此对整张图扫描一遍后会得到$3\times3\times1$的卷积层,同样是九个神经元。但是,因为使用同一个卷积核,其参数是不会变的——9个,也就是卷积核的大小。要达到和仿射层一样的参数水平,我们需要用到25个卷积核,但一般来说并不需要那么多捕捉特征的卷积核。
因此通过权重共享和局部全连接两种方式,可以明显减少参数的数量。
那么,如果当stride取2的时候,对于上述例子,一共只需要输出4个神经元就可以了,为后续减少了更多负担(当然也不可避免的失去一些信息)
Zero Padding
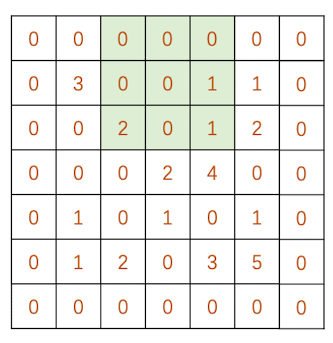
细心的同学们可能发现,图像边缘的像素做的卷积次数要比图像中间像素做的要少很多。因此有可能导致边缘的pattern无法被卷积核有效捕捉。为了解决这个问题,我们可以用0对图像的边缘进行补充,使得整张图片都位于图像里面:
比如说,对于$N\times N$ 的图片,$F\times F$的卷积核,步长为1,padding为1,最终得到的activation map 的边长为:
这是因为,padding会给图像的左右两边同时加上一列,因此我们要乘以2.
事实上,由于卷积核的大小不同,为了保持卷积后activation map的大小不变,一般我们会取不同的padding。
- 当F=3, padding 大小可取1, $2\times1-3=-1$
- 当F=5, padding 大小可取2, $2\times2-5=-1$
- 当F=7, padding 大小可取3, $2\times3-7=-1$
Activation Maps
现在我们来做一个小练习:考虑两层的卷积神经网络。输入层图像的大小为$32\times 32\times3$, 第一层一共有6个$7\times7 \times3$的卷积核,第二层是10个$5\times5\times6$的卷积核。第一层有大小为2的padding,两层的stride均为1。请给出每层的activation maps的大小、深度, 以及每一层参数的个数。
首先,我们计算第一个activation maps的边长:
第一个activation maps的深度等于该层卷积核的个数,也就是6
因此,第一个activation map的大小为:$30\times30\times6$
参数个数为卷积核的个数 乘以 卷积核的大小加上偏置项(一般为1),即 $6\times(7\times7\times3+1)=888$
然后计算第二层activation maps的边长:
第二层activation maps的深度等于该层卷积核的个数,也就是10
因此,第二个activation maps的大小为:$26\times26\times10$
参数个数为$10\times(5\times5\times 6+1)=1510$
小结
现在我们对卷积层做一个小结,并总结出一套通用的计算公式
- 设当前层的输入矩阵为: $W_1\times H_1\times D_1$
- 设置4个必要的超参数:
- filter的个数$K$, 大小(边长)为 $F$, 因此可以确定有 $K$ 个偏置项
- stride的大小为$S$
- Zero padding的数量为 $P$
那么由上述数据,我们可以计算得到下一层的 activation maps 的大小为:
- $W_2 = \frac{W_1-F+2P}{S}+1$
- $H_2=\frac{H_1-F+2P}{S}+1$
- $D_2=K$
第 d 个activation map是第d个filter与输入层做卷积后的结果(每个卷积都加上第d个偏置量)
最后,我们给出常用的超参数设置:
- K=32,64,128,256 ……
- F=3,S=1,P=1
- F=5,S=1,P=1或2
- F=5,S=2,P=满足整除的数
- F=1,S=1,P=0 (这个就相当于全连接,但是参数都是一样的)
池化层
池化(Pooling):也称为欠采样或下采样。主要用于特征降维,压缩数据和参数的数量,减小过拟合,同时提高模型的容错性。因为卷积过后 activation map可能还是具有较强的线性,使用池化可以有效降低这种线性
一般来说,每隔几个 Conv+ReLU 层后,会又一层 Pooling,以有效减小参数(像素采样)
那么池化层该怎么做呢?
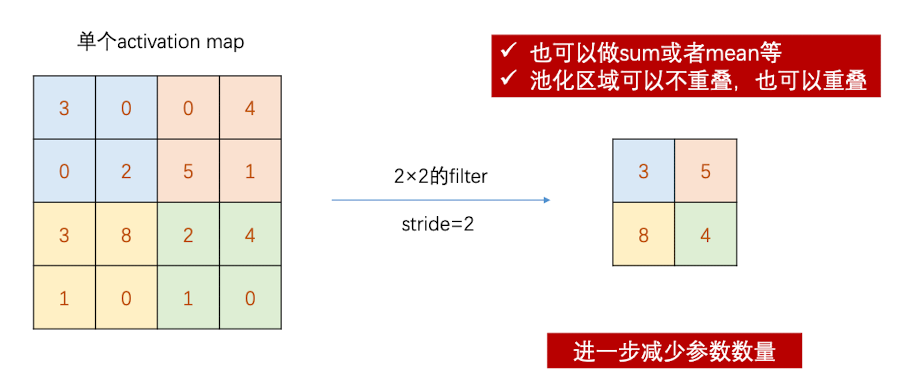
Pooling就相当于一个没有参数的卷积核,它对activation map中的一部分区域做mean、sum或者max操作,得到新的map。比如说,Max Pooling就是取一个部分中的最大值:(实际意义就是保留最突出的特征)
小结
假设 Conv+ReLU层的输出为 $W_1\times H_1\times D_1$
我们设置两个超参数
- filter的大小(边长)为 $F$ ,只需要一个没有参数的 filter
- Stride 大小为 $S$
- 一般不做padding
一般,我们常用的设置为:
- $F=2,S=2$
- $F=3,S=2$
最后生成大小为 $W_2\times H_2\times D_2$的 feature maps
- $W_2 = \frac{W_1-F}{S}+1$
- $H_2=\frac{H_1-F}{S}+1$
- $D_2=D_1$
FC层
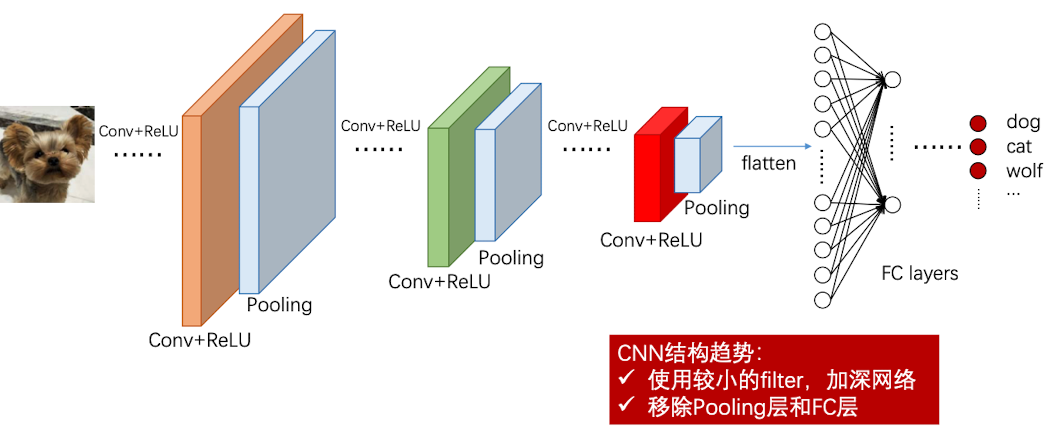
当缩小到一定程度之后,我们对图像进行扁平化,将其压平成一列,并进行全连接,最后得到图像分类的结果
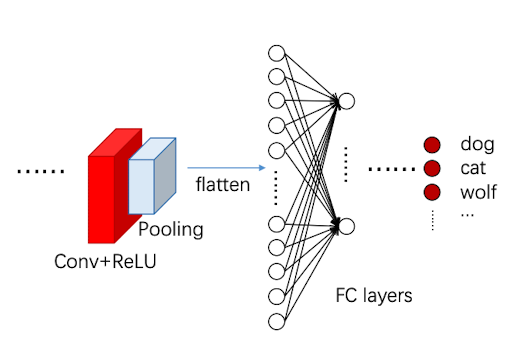
完整的CNN如下:
反向传播
反向传播我们倒过来看, 首先是池化层,然后是激活函数层(ReLU),最后看卷积层
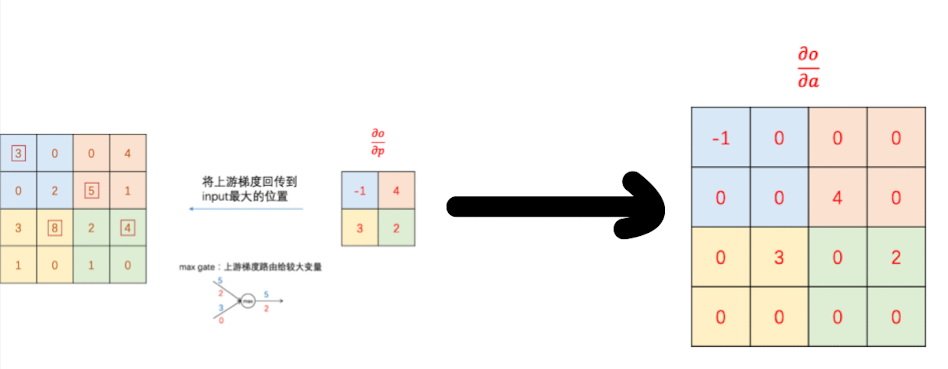
Max Pooling
首先,最大池化的操作就是把一部分区域的最大值传给下一层。那么这就相当于梯度流的常见模式中的max gate。那么,在反向传播时,上游梯度就会回传到input最大的位置:
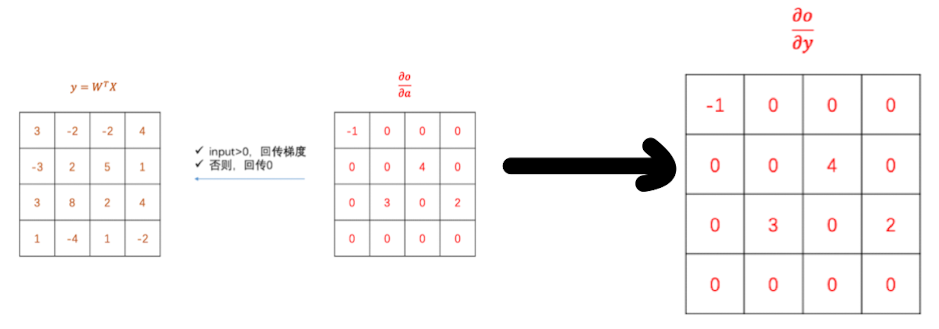
ReLU
ReLU的反向传播也很简单,如果输入层的像素大于0,那么就回传梯度,否则就回传0
Conv
比较复杂的反向传播就是卷积层的反向传播,其实卷积层的反向传播也需要做一次卷积。
我们既要算权重的梯度,也要算输入的梯度
参考博客: https://www.cnblogs.com/pinard/p/6494810.html
我们用一个例子来推导,然后再一般化得到公式:
假设我们 $l-1$ 层的输出值 $a^{l-1}$是一个$3\times 3$的矩阵,第$l$ 层的卷积核 $W^{l}$ 是一个$2\times2$的矩阵,步长为1,那么输出的矩阵边长大小为$(3-2)/1+1=2$ 。我们不考虑偏置项,则有:
我们列出 $a,W,z$的矩阵表达式如下:
根据卷积的定义,我们很容易得出:
接着,我们模拟反向求导:
从上式可以看出,对于 $a^{l-1}$ 的梯度误差 $\nabla a^{l-1}$ ,等于第l层的梯度误差乘以 $\frac{\partial z^l}{\partial a^{l-1}}$ , 而 $\frac{\partial z^l}{\partial a^{l-1}}$ 对应上面的例子中相关联的 w 的值。假设我们的z矩阵对应的反向传播误差是 $\delta{11},\delta{12},\delta{21},\delta{22}$组成的$2\times 2$矩阵,则利用上面梯度的式子和4个等式,我们可以分别写出 $\nabla a^{l-1}$ 的9个标量梯度。
比如对于 $a{11}$ 的梯度,由于在4个等始终,$a{11}$只和$z_{11}$有关,从而我们有:
以此类推,我们可以得到:
这上面9个式子其实可以用一个矩阵卷积的形式表示,即:
为了符合梯度计算,我们在误差矩阵周围填充了一圈0,此时我们将卷积核翻转后和反向传播的梯度误差进行卷积,就得到了前一次的梯度误差。
因此,我们可以将其一般化:
首先,在DNN中,我们知道$\delta^{l-1}$和 $\delta^{l}$(由后向前推)的递推关系为:
因此,要推得到 $\delta^{l-1}$ ,必须要先计算 $\frac{\partial z^l}{\partial z^{l-1}}$
因为 $z^{l-1}$ 和$z^{l}$是前向传播得到的,其关系为:
因此:
这里的式子其实和DNN的类似,区别在于对于含有卷积的式子求导时,卷积核被旋转了180度。即式子中的$rot180$,翻转180度的意思是上下翻转一次,接着左右翻转一次。在DNN中这里只是矩阵的转置。那么为什么呢?由于这里都是张量,直接推演参数太多了。我们以一个简单的例子说明为啥这里求导后卷积核要翻转。
已知卷积层的$\delta^l$,推导该层的W,b的梯度
好了,我们现在已经可以递推出每一层的梯度误差$\delta^l$ 了,对于全连接层,可以按DNN的反向传播算法求该层W,b的梯度,而卷积层的W,b需要求出。
在第l层,某个卷积核矩阵 $\boldsymbol W$ 的导数可以表示如下:
假设输入的a是$4\times 4$矩阵,卷积核 $\boldsymbol W$是$3\times3$的矩阵,输出z是$2\times2$的矩阵,那么反向传播的z的梯度误差$\delta$ 也是$2\times 2$的矩阵。
那么根据上面的例子,我们有:
最终一共得到9个式子,整理后可得:
从而可以清楚的看到这次我们为什么没有反转的原因。
而对于b,则稍微有些特殊,因为$\delta^l$是高维张量,而$b$只是一个向量,不能像DNN那样直接和$\delta^l$相等。通常的做法是将$\delta^l$的各个子矩阵的项分别求和,得到一个误差向量,即为$b$的梯度
总结CNN
现在我们总结下CNN的反向传播算法,以最基本的批量梯度下降法为例来描述反向传播算法。
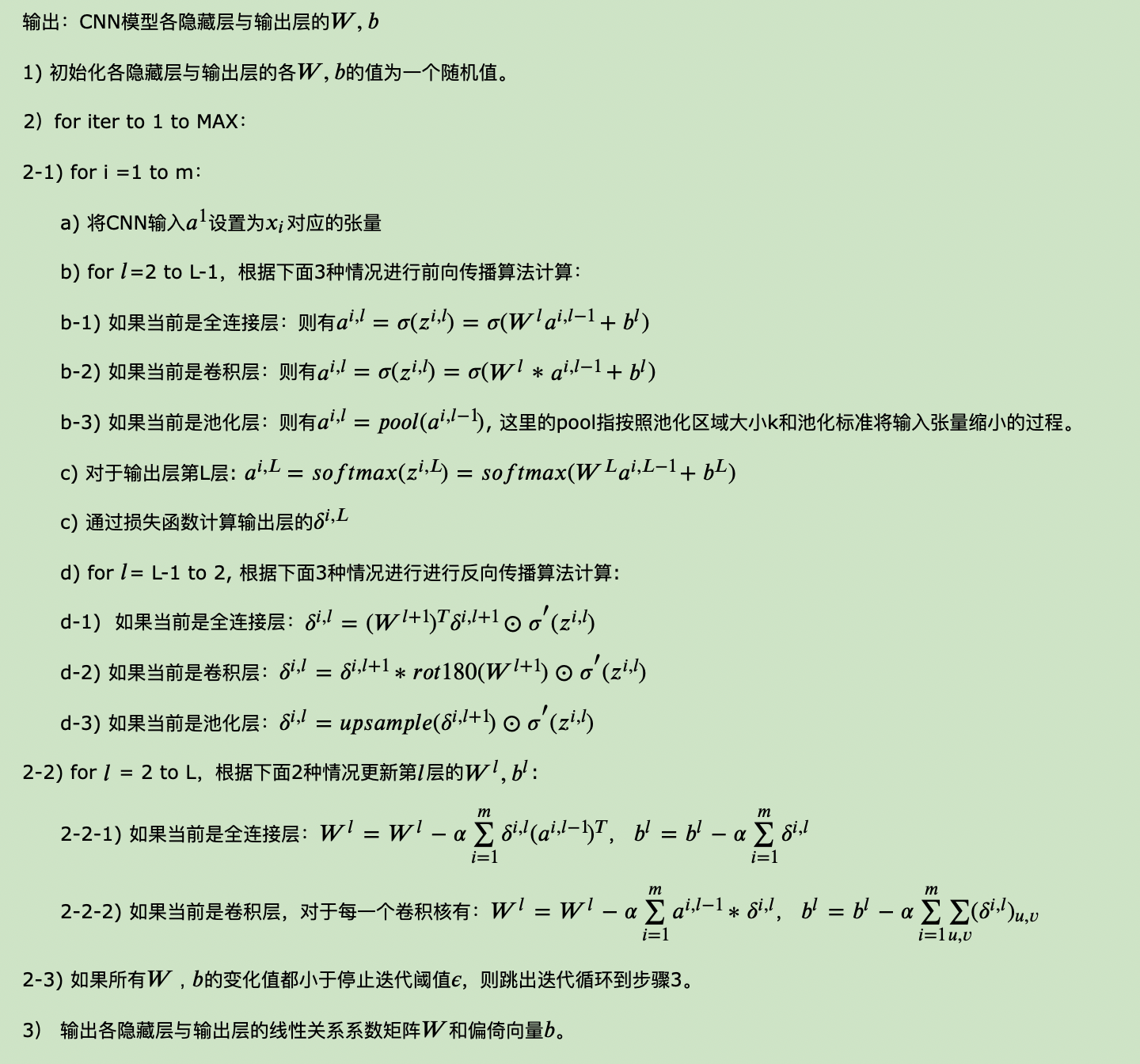
输入:m个图片样本,CNN模型的层数L和所有隐藏层的类型,对于卷积层,要定义卷积核的大小K,卷积核子矩阵的维度F,填充大小P,步幅S。对于池化层,要定义池化区域大小k和池化标准(MAX或Average),对于全连接层,要定义全连接层的激活函数(输出层除外)和各层的神经元个数。梯度迭代参数迭代步长$\alpha$,最大迭代次数MAX与停止迭代阈值$\epsilon$
输出:CNN模型各隐藏层与输出层的𝑊,𝑏